FANUC A16B-3200-0612 | Amplificateur de servomoteur 6 axes PCB — Série A16B-3200, carte de contrôle de servomoteur / CNC de robot, pièce de rechange industrielle, origine Japon
Vue d'ensemble
Le FANUC A16B-3200-0612 est un circuit imprimé d'amplificateur de servomoteur de la série A16B-3200 de FANUC — la famille de circuits imprimés couvrant les plateformes de contrôle CNC et robotiques de FANUC de la fin des années 1990 aux années 2010.
La série A16B-3200 est vaste : elle comprend des cartes CPU principales, des cartes mères de robot, des circuits imprimés de contrôle d'amplificateur de servomoteur et des cartes d'interface de communication sur plusieurs générations de produits FANUC.
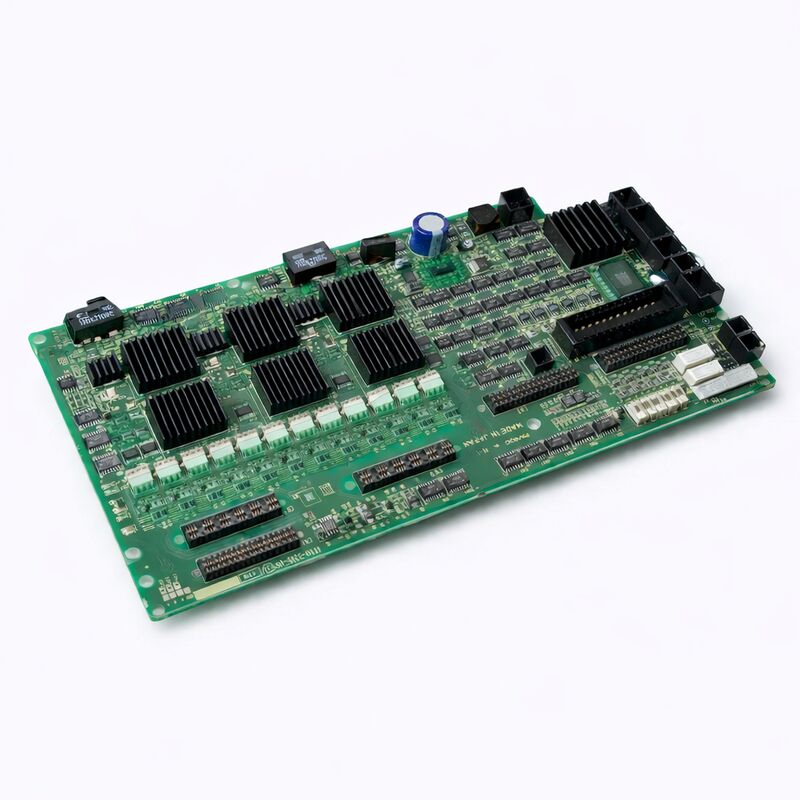
L'identité de la variante -0612 en tant que circuit imprimé d'amplificateur de servomoteur 6 axes est confirmée par sa construction physique — plusieurs boîtiers de circuits intégrés de haute puissance avec des assemblages de dissipateurs thermiques disposés sur la carte, chacun responsable des signaux de commande de grille des IGBT d'un axe de servomoteur.
Dans une armoire d'entraînement CNC ou robotique multi-axes FANUC, l'électronique de contrôle du servomoteur se situe entre la sortie de commande du contrôleur CNC/robot et l'étage de puissance IGBT physique qui alimente les servomoteurs.
Le A16B-3200-0612 occupe cette position intermédiaire critique — il reçoit les commandes de position et de vitesse des axes du CPU du robot ou du CNC, exécute les calculs de la boucle de contrôle de servomoteur en temps réel et génère les signaux PWM qui pilotent les semi-conducteurs de puissance.
Sans un circuit imprimé de contrôle de servomoteur fonctionnel, aucun mouvement d'axe n'est possible, quelle que soit l'état du moteur, de la chaîne cinématique mécanique ou de l'alimentation.
Le contrôleur R-30iA Mate dans lequel le A16B-3200-0612 a été identifié est le contrôleur robotique compact de FANUC conçu pour les robots plus petits — le R-2000iA Mate, le M-10iA, le M-20iA et les séries de robots compacts apparentées couramment utilisées dans les applications d'assemblage, de manutention, de soudage et de prélèvement et dépose.
Le facteur de forme compact du R-30iA Mate intègre l'alimentation, l'amplificateur et l'électronique de contrôle dans une armoire densément emballée, faisant de la réparabilité au niveau de la carte l'approche de maintenance préférée plutôt que le remplacement complet du contrôleur.
Spécifications clés
| Paramètre |
Valeur |
| Série |
A16B-3200 |
| Fonction |
Circuit imprimé d'amplificateur de servomoteur 6 axes |
| Configuration |
Multi-CI avec assemblages de dissipateurs thermiques |
| Application connue |
Contrôleur robotique R-30iA Mate |
| Origine |
Japon |
| Statut |
Pièce de rechange discontinuée |
Contrôle de servomoteur à six axes — L'architecture derrière la carte
Un circuit imprimé de contrôle de servomoteur à 6 axes gère le contrôle simultané et indépendant de six axes de servomoteur — les six articulations d'un bras robotique industriel typique (J1 à J6).
Chaque axe nécessite sa propre boucle de contrôle exécutée à la fréquence porteuse PWM (typiquement 4 à 8 kHz) : lecture de la position de l'encodeur de joint, comparaison avec la position commandée, calcul de la référence de courant via l'erreur de vitesse et de position, et sortie du rapport cyclique PWM approprié pour le pont IGBT de l'axe.
Les six boucles s'exécutent en parallèle, à chaque cycle PWM, sans s'interrompre mutuellement.
Le refroidissement visible sur le A16B-3200-0612 reflète la charge thermique de l'exécution simultanée de six circuits de commande de grille à haute fréquence.
Les circuits intégrés de commande de grille dissipent une puissance proportionnelle à la charge de grille des IGBT qu'ils pilotent, à la tension de commande de grille et à la fréquence de commutation.
À 6 kHz PWM sur six axes, la dissipation combinée de la commande de grille est importante — les dissipateurs thermiques garantissent que les circuits intégrés de commande de grille restent dans leur température de jonction maximale, empêchant la dérive induite par la chaleur qui dégraderait les performances du servomoteur ou provoquerait une défaillance prématurée du circuit intégré.
Identification d'un A16B-3200-0612 défectueux
Lorsque le circuit imprimé de l'amplificateur de servomoteur tombe en panne dans un R-30iA Mate ou un système similaire, le contrôleur robotique ne peut pas établir le statut de servomoteur prêt.
Le pupitre affiche généralement des alarmes dans la catégorie du système de servomoteur — codes d'alarme SRVO dans la terminologie des robots FANUC — qui indiquent des défauts de communication ou d'entraînement de servomoteur au niveau de l'axe.
Les présentations courantes incluent :
Plusieurs axes en alarme simultanément : Comme le A16B-3200-0612 gère les six axes, une défaillance de la carte affecte souvent tous les axes simultanément plutôt qu'un seul. Un défaut de servomoteur sur un seul axe, en revanche, est plus susceptible d'être un problème de moteur, de câble ou d'encodeur qu'une défaillance de la carte.
Le statut de servomoteur prêt ne peut pas être établi après un cycle d'alimentation : La séquence d'initialisation de l'entraînement, qui comprend la confirmation par la carte de l'amplificateur de servomoteur de ses alimentations et de son circuit de commande de grille, échoue à plusieurs reprises malgré des tensions d'alimentation claires.
Codes d'alarme spécifiques : SRVO-047 (erreur de vitesse du servomoteur) sur plusieurs axes, ou alarmes de servomoteur de type communication, combinées à l'absence de défaut mécanique ou moteur, indiquent le circuit imprimé de l'amplificateur comme source du défaut.
FAQ
Q1 : Le A16B-3200-0612 peut-il être utilisé dans des systèmes autres que le R-30iA Mate, et comment la compatibilité est-elle confirmée ?
Le A16B-3200-0612 a été identifié dans les contrôleurs R-30iA Mate, mais la série A16B-3200 couvre plusieurs plateformes FANUC. La compatibilité avec un système spécifique nécessite de faire correspondre la disposition des connecteurs de la carte, les dimensions des emplacements et le protocole d'interface à l'architecture du backplane et de l'amplificateur de servomoteur du système cible.
Avant de commander pour un système autre que le R-30iA Mate, confirmez le numéro de pièce par rapport au manuel de maintenance ou à la liste des pièces de rechange du contrôleur.
L'installation d'une carte avec des brochages ou des protocoles incompatibles peut endommager la carte et le système.
Q2 : La carte a été retirée d'une machine mise hors service et non testée séparément. Quels sont les risques ?
Une carte non testée retirée d'un système mis hors service représente un niveau de qualité inconnu — elle peut être entièrement fonctionnelle, ou elle peut avoir échoué lors du même événement qui a mis la machine hors service.
Avant l'installation dans un système de production, la carte doit être testée sur un banc d'essai compatible si possible, ou installée en sachant pleinement que la première mise sous tension est effectivement un test sur le terrain. Avoir un plan de secours (une autre carte de rechange, ou un centre de réparation en attente) avant d'installer une carte non testée dans un robot de production minimise le risque de temps d'arrêt.
Q3 : Quels outils ou bancs d'essai sont nécessaires pour vérifier le A16B-3200-0612 avant l'installation ?
Un test approprié nécessite un banc d'essai de contrôleur robotique ou CNC FANUC compatible — le même type de contrôleur pour lequel la carte est conçue — avec des alimentations d'amplificateur de servomoteur fonctionnelles, un ensemble de servomoteurs (ou de résistances de charge) connectés, et la capacité d'exécuter des commandes de mouvement robotique.
Les centres de réparation spécialisés FANUC maintiennent de tels bancs d'essai spécifiquement pour la vérification au niveau de la carte.
Sans un banc d'essai compatible, le test fonctionnel sur la machine de production cible est la seule option, ce qui comporte le risque d'un temps d'arrêt prolongé si la carte de remplacement est également défectueuse.
Q4 : Les dissipateurs thermiques de trois des puces sont manquants sur la carte. Cela affecte-t-il la fonctionnalité ?
Les dissipateurs thermiques manquants sur les circuits intégrés de commande de grille augmentent le risque de défaillance thermique pendant le fonctionnement. Les circuits intégrés de commande de grille sans dissipateurs thermiques peuvent fonctionner dans les spécifications à des cycles de service faibles ou à des températures ambiantes basses, mais peuvent surchauffer lors d'un fonctionnement soutenu à haute fréquence dans un environnement d'armoire chaud.
Avant l'installation, les dissipateurs thermiques manquants doivent être remplacés par un composé thermique approprié et du matériel de dissipateur thermique équivalent.
La taille du boîtier du circuit intégré et la dissipation de puissance déterminent les spécifications correctes du dissipateur thermique — consultez la fiche technique du circuit intégré concerné pour les exigences de résistance thermique.
Q5 : Quelle sauvegarde ou documentation doit être préparée à partir de la machine d'origine avant de remplacer le A16B-3200-0612 ?
Pour les systèmes robotiques, sauvegardez : tous les programmes robotiques (écran PROG — sauvegarde ALL.TP), tous les paramètres système (fichier SYSVAR), les données de mise à niveau (positions de référence des encodeurs d'articulation — critiques pour la précision du robot après le remplacement de la carte), et toute donnée de configuration d'E/S.
Pour les systèmes CNC, sauvegardez : tous les paramètres CNC, le ladder PMC et les programmes de pièces.
Le circuit imprimé de contrôle du servomoteur lui-même ne stocke pas ces données (il est sans état du point de vue des données de la machine), mais la procédure de remplacement peut nécessiter une séquence de redémarrage du servomoteur qui efface certains états volatils du servomoteur — toutes les données critiques doivent être sauvegardées extérieurement avant de commencer tout remplacement de carte dans un système de production.

 Votre message doit contenir entre 20 et 3 000 caractères!
Votre message doit contenir entre 20 et 3 000 caractères!